
Cùng cùng với sự cải cách và phát triển chóng phương diện của ngành công nghiệp chế tạo, bộ động cơ bước đang được sử dụng ngày dần nhiều trong số máy móc cũng giống như các quá trình sản xuất. Vậy, động cơ bước là gì, có cấu tạo và ưu điểm yếu kém gì xứng đáng chú ý? nội dung bài viết dưới phía trên sẽ cho mình câu vấn đáp cụ thể, chi tiết nhất!
1. Khái niệm bộ động cơ bước step motor là gì?
Động cơ cách (còn call là Step Motor tốt Stepping Motor) chínhlà một trang bị cơ điện, nó bao gồm tác dụng thay đổi năng lượng điện biến thành cơ năng. Xung quanh ra, nó cũng là một động cơ điện không tồn tại chổi than, bộ động cơ đồng bộ, hoàn toàn có thể chia một vòng quay không thiếu thốn ra thành nhiều bước mở rộng.
Bạn đang xem: Phân loại động cơ bước
Trục của rượu cồn cơ lúc ấy sẽ quay sang 1 góc cố định của từng xung tách rạc. Khi một chuỗi xung hoạt động, nó sẽ được chuyển sang 1 góc độc nhất vô nhị định. Góc mà trục hộp động cơ bước thực hiện quay cho từng xung nói một cách khác là góc bước, thường được tính bằng độ.
Động cơ bước nói một cách khác là Step Motor hay Stepping Motor
Nếu góc bước của hộp động cơ càng nhỏ dại thì số bước trên mỗi vòng quay của nó lại càng phệ và độ đúng chuẩn đối với vị trí thu được cũng càng lớn. Các góc bước của đụng cơ rất có thể lớn cho tới 90 độ và bé dại nhất mang lại 0,72 độ. Mặc dù nhiên, những góc cách thường được sử dụng nhiều nhất là 1,8 độ và 2,5 độ hoặc 7,5 độ cùng 15 độ.
2. Phân loại hộp động cơ bước
Phân loại hộp động cơ bước tùy thuộc vào số trộn như sau:
Loại 1: Động cơ bước 2 pha đó là loại bộ động cơ bước bao hàm có 4 dây, động cơ bước 6 dây hoặc bao gồm khi là hộp động cơ bước 8 dây.Loại 2: Động cơ cách 3 pha là đó là loại động cơ bước 3 dây hoặc có khi là hộp động cơ bước 4 dây.Loại 3: Động cơ bước 5 pha chín là loại động cơ bước gồm tất cả 5 dây.Phân một số loại theo con số cực của bộ động cơ bước như sau:
Động cơ solo cực: chiếc điện luôn luôn luôn chạy qua cuộn dây chỉ theo cùng một hướng. Điều này chất nhận được động cơ sử dụng mạch tinh chỉnh và điều khiển đơn giản, do nó sẽ tạo ra tế bào men xoắn thấp hơn là hộp động cơ lưỡng cực.Động cơ lưỡng cực: dòng điện của hễ cơ có thể chạy qua cuộn dây theo 1 trong 2 hướng. Trong những lúc đó, điều này lại yên cầu một mạch điều khiển phức tạp hơn là cồn cơ đối kháng cực, nó sẽ khởi tạo ra các mô men xoắn hơn nữa.Phân loại bộ động cơ bước tùy thuộc vào các Rotor như sau:
Động cơ bước nam châm từ vĩnh cửu (tiếng Anh hotline là Permanent magnet stepper viết tắt là PM) chỉ sử dụng một nam châm hút từ vĩnh cửu phía bên trong rotor. Nó chuyển động dựa bên trên lực hút hoặc lực đẩy giữa thành phần rotor PM và nam châm điện của stator.Động cơ bước có thay đổi điện trở (tiếng Anh hotline là Variable Reluctance Stepper Motor viết tắt VR) có một rotor sắt trơn. Nó chuyển động dựa trên nguyên lý miễn cưỡng về tối thiểu, điều này xảy ra với khe hở tối thiểu, bởi đó những điểm rotor của bộ động cơ để bị hút về phía cực nam châm hút từ của phần stator.Động cơ bước đồng hóa lai (còn gọi là Hybrid Synchronous Stepper Motor viết tắt là HB. Đặt thương hiệu như vậy bởi vì chúng sử dụng phối kết hợp đồng thời các kỹ thuật nam châm từ vĩnh cửu (tức là PM) và đổi khác điện trở (tức là VR) để đạt được công xuất cực mạnh trong một kích thước vô cùng nhỏ dại gọn.3. Cấu tạo động cơ bước
Về cấu tạo, motor step (động cơ bước) thường bao gồm có các phần tử chính chính là stato, roto chính là nam châm vĩnh cửu. Vào trường hợp đụng cơ trở thành từ trở lại chính là những khối răng được gia công bằng vật tư nhẹ tất cả từ tính cao. Động cơ bước được điều khiển bởi một bộ tinh chỉnh và điều khiển từ mặt ngoài. Động cơ cách và bộ tinh chỉnh và điều khiển sẽ được thiết kế theo phong cách sao cho chúng rất có thể giữ nguyên bất kỳ vị trí cố định nào và có thể quay mang lại được bất kỳ một địa điểm nào.
Động cơ cách thường được sử dụng trong khối hệ thống điều khiển có vòng hở solo giản, hoặc là vòng kín đáo đều được. Tuy nhiên, khi thực hiện động cơ phi vào trong hệ điều khiển và tinh chỉnh vòng hở khi máy móc bị quá cài đặt thì toàn bộ các quý hiếm của động cơ đều bị không đủ và hệ thống cũng cần được nhận diện lại.
Sơ đồ cấu tạo, motor step (động cơ bước)
4. Thiết đặt thông số motor cách cho rượu cồn cơ thế nào mới đúng?
Đầu tiên, bạn phải chỉnh thông số cho những trục X,Y,Z tương xứng với 3 thông số của $100, $101,$102 ở trên phần mềm glbr control 3.61.
Chỉnh cái sao cho phù hợp với động cơ.
Chỉnh thông số kỹ thuật như sau:
Đầu tiên, hãy tìm hiểu xem các loại động cơ của máy là loại từng nào độ 1 bước, chiếc này có thể quan sát thấy trên thân hễ cơ. Thông thường, các loại động cơ bước bây chừ có thông số kỹ thuật là 1.8 độ, có nghĩa là mỗi một xung cung cấp từ driver thì nó sẽ quay được 1.8 độ. Vậy ước ao động cơ quay được một vòng 360 độ thì họ cần từng nào xung? Rất 1-1 giản, các bạn chỉ yêu cầu lấy 360/ 1.8 = 200.Trên driver A4988, động cơ còn tồn tại MS1 MS2 MS3, bao gồm 3 jum gặm này bạn sẽ đánh vết và bảng báo giá trị đến 3 jum như sau:Đầu tiên là full step: Khi các bạn để trống cả 3 vị trí này (tức là không gặm jum nào) có nghĩa là để mức low (thấp) sẽ tương tự với chế độ full step. Chế độ này đòi hỏi muốn quay được một vòng thì bạn sẽ cần 360/ 1.8 = 200 xungTiếp cho là chính sách half step: Dựa theo chính sách này thì ta nên cắm jump vào vị trí MS1 để hoàn toàn có thể kéo chân đó lên được mức cao. Chế độ này nghĩa là 1 xung driver cấp cho động cơ của dòng sản phẩm sẽ con quay được 1.8/ 2 = 0.9 độ. Vậy để hộp động cơ quay được một vòng thì ta sẽ cần là 360/ 0.9 = 400 xung.
Thứ 3 là chính sách quarter step: cái chữ “eighth step”, “sixteenth step” được điện thoại tư vấn tắt là các cơ chế từ 1/4, 1/8 mang lại 1/16 bước, bọn chúng sẽ cài đặt và vận động tương tự. Ở các chế độ này, nếu bạn có nhu cầu động cơ quay được một vòng thì cần có số xung tương ứng rõ ràng là 800, 1600, 3200,
Và trên phần mềm, các bạn hãy xem xét 3 thông số là: $100,$101,$102,... Theo đơn vị chức năng của nó là pulse/ milimet đây đó là số xung bắt buộc cấp khiến cho trục X, Y, Z của bộ động cơ chạy được 1mm.
Giả sử rượu cồn cơ của máy là nhiều loại 1.8 độ, và chúng ta để ở chế độ full step, sử dụng vitme tất cả bước ren 8 (tức là xoay 1 vòng sẽ tiến được 8mm) thì ta vẫn tiến hành thiết đặt như sau: full step gồm 1,8 độ, tức là bạn sẽ cần 200 xung để quay được một vòng, với để cù 1 vòng thì nên đi được 8mm. Theo đó, ý muốn đi được 1mm thì cần quay 200/ 8 = 25 vòng.
Xem thêm: Tâm Lý Trẻ 1 Tuổi Bế Bồng (0, Đặc Trưng Tính Cách Ở Bé 1 Tuổi Mẹ Nên Biết
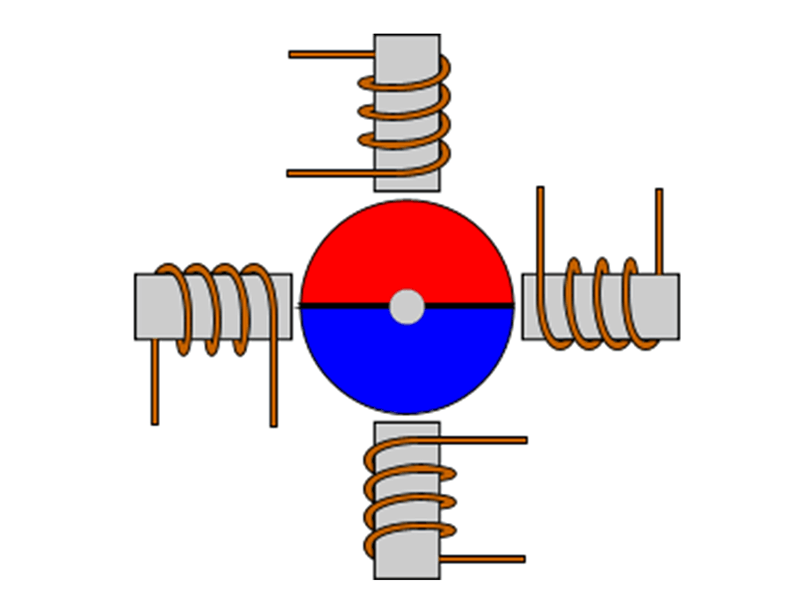
5 Nguyên lý hoạt động của động cơ bước
Nguyên lý hoạt động vui chơi của motor bước nam châm từ vĩnh cửu bao gồm 2 cặp cuộn dây pha đó là: thuở đầu vị trí của stato và roto đang ở đoạn phase A. Khi cung cấp điện đến 2 cuộn dây trộn B với D khớp ứng trong 2 cuộn sẽ xuất hiện được rất tính.
Do cực tính của các cuộn dây pha với rôto trong bộ động cơ ngược nhau dẫn cho roto sẽ chuyển động được cho vị trí phase B on. Lúc cuộn dây trộn B với D ngắt điện, còn cuộn dây A cùng B được cấp điện thì lúc này roto lại chuyển động đến địa chỉ phase C on.

Cực tính của những cuộn dây pha và rôto trong động cơ ngược nhau
6. Ứng dụng của hộp động cơ bước
Các ứng dụng phổ cập của những loại động cơ bước hiện nay đó là:
Máy công nghiệp : Động cơ bước được sử dụng trong sản phẩm đo ô tô và máy điều khoản thiết bị cung ứng tự động, vật dụng CNC.
Bảo mật: sản phẩm giám sát mới mang lại ngành an ninh.
Y tế Động cơ cách được sử dụng bên trong máy quét y tế, trang bị lấy chủng loại và cũng được tìm thấy bên phía trong chụp hình ảnh nha khoa chuyên môn số, bơm chất lỏng, khía cạnh nạ phòng độc và máy so sánh máu.
Điện tử chi tiêu và sử dụng : Động cơ cách trong máy hình ảnh cho chức năng lấy nét và thu phóng camera kỹ thuật số tự động, đồ vật in 3D.
7. Ưu điểm yếu kém của động cơ bước
Ưu điểm của bộ động cơ bước:
Do cấu trúc phía bên trong mà bộ động cơ bước không cần cảm ứng để hoàn toàn có thể phát hiện được vị trí động cơ. Khi đụng cơ di chuyển đến vị trí hy vọng muốn bằng phương pháp thực hiện các bước thì lúc này cách đơn giản đó là tiến hành đếm quá trình này. Lúc đó, bạn có thể biết được vị trí bộ động cơ tại 1 thời điểm độc nhất định.
Ngoài ra, việc điều khiển động cơ bước cũng kha khá đơn giản. Động cơ cách không bắt buộc bộ trình điều khiển, cũng không cần thống kê giám sát cho phức hợp hoặc phải kiểm soát và điều chỉnh để hoạt động cho đúng. Quan sát chung, cách tinh chỉnh động cơ cách vô cùng dễ dàng.
Với chế độ microstepping, chúng ta cũng có thể đạt được độ đúng mực về vị trí cao nhất, hoàn toàn có thể lên tới khoảng tầm 0,007 °. Động cơ bước cung ứng mô men xoắn cho động cơ cực tốt ở tốc độ thấp, rất tương xứng cho việc giữ vị trí với nó cũng có tuổi thọ nhiều năm hơn.

Việc tinh chỉnh và điều khiển động cơ bước cũng kha khá đơn giản
Nhược điểm của bộ động cơ bước:
Động cơ bước có thể gặp mặt phải vấn đề như lỡ cách khi tế bào men bị xoắn cài quá cao. Điều này còn gây ảnh hưởng tiêu cực đến việc kiểm soát điều hành vị trí, vì không có cách nào buổi tối ưu để hiểu rằng vị trí thực thụ của hễ cơ.
Những hộp động cơ bước luôn tiêu hao mẫu điện buổi tối đa, kể cả khi bộ động cơ không hoạt động. Điều này khiến cho hiệu suất có tác dụng việc của máy kém rộng và có thể gây ra tình trạng quá nhiệt.
Kết luận
Tóm lại, việc áp dụng động cơ cách chỉphù hợpkhi bạn cần một chiến thuật tối ưu để tiết kiệm chi phí, dễ tinh chỉnh và không phải sử dụngđối với các ứng dụng cầnmô men xoắn chạy ở tốc độ cao. Động cơ bước gồm mô men xoắn thấp, vì chưng vậy, này lại trở yêu cầu khá ồn lúc chạy ở vận tốc cao. Đồng thời, bọn chúng có tỷ lệ công suất thấp và tỷ lệ mô men xoắn theo quán tính thấp.









{kind=link}